Nan ZHOU
 Assistant Researcher, Pengcheng Laboratory, Shenzhen, China
Assistant Researcher, Pengcheng Laboratory, Shenzhen, China
I’m Nan Zhou. My research interests include Intelligent Industrial Automation, Intelligent Edge Computing, and Reconfigurable Manufacturing Systems.

Education
-

South China University of Technology
Ph.D. in Mechatronics Engineering (Supervisor is Prof. Di Li) Sep. 2013 - Jul. 2021
-
South China University of Technology
B.S. in Mechanical Engineering and Automation Sep. 2009 - Jul. 2013
Experience
-
Pengcheng Laboratory
Post-Doctoral Research Fellow (Supervisor is Prof. Weihua Gui) Sep. 2021 - Jul. 2024
Service
- Young Editorial Board Member of Natural Science Journal of Hainan University
- Reviewer of 自动化学报
- Reviewer of IEEE Transactions on Industrial Informatics
- Reviewer of IEEE Transactions on Industrial Electronics
- Reviewer of IEEE Transactions on Automation Science and Engineering
- Reviewer of IEEE Transactions on Systems, Man, and Cybernetics-Systems
Selected Publications
(view all ) 
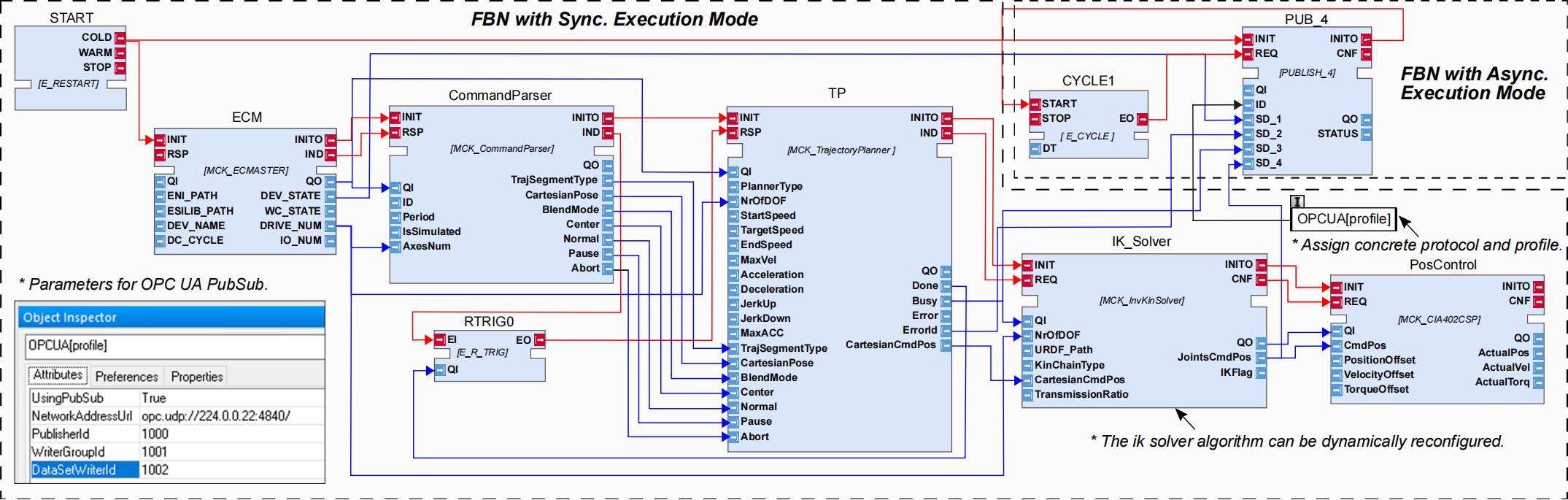
Hybrid Synchronous–Asynchronous Execution of Reconfigurable PLC Programs in Edge Computing
Nan Zhou, Di Li
IEEE Transactions on Industrial Informatics 2021 Journal
In edge computing, heterogeneous automation tasks, such as networked motion control and reconfiguration management, have diverse weights on determinism and flexibility. Such heterogeneities escalate the demands on the runtime environments (RTEs) of programmable logic controllers to provide the best-suited rather than one-size-fits-all execution policies for reconfigurable programs. This article presents the proposal and implementation of a novel IEC 61499-based RTE capable of offering hybrid synchronous and asynchronous execution models for function block (FB) based programs. We also construct a runtime reconfigurable FB-type repository by realizing a just-in-time FB-type definitions compiler in the RTE. Finally, we evaluate and compare the proposed RTE and state-of-the-art works by running a set of synthetic benchmark programs and a realistic networked motion control kernel and application. Experiment results from the benchmark programs have shown a maximal 40% faster execution speed in our RTE. Furthermore, our RTE can ensure fewer jitters during distributed motion control with a 1-ms cycle time on a realistic motion control testbed.
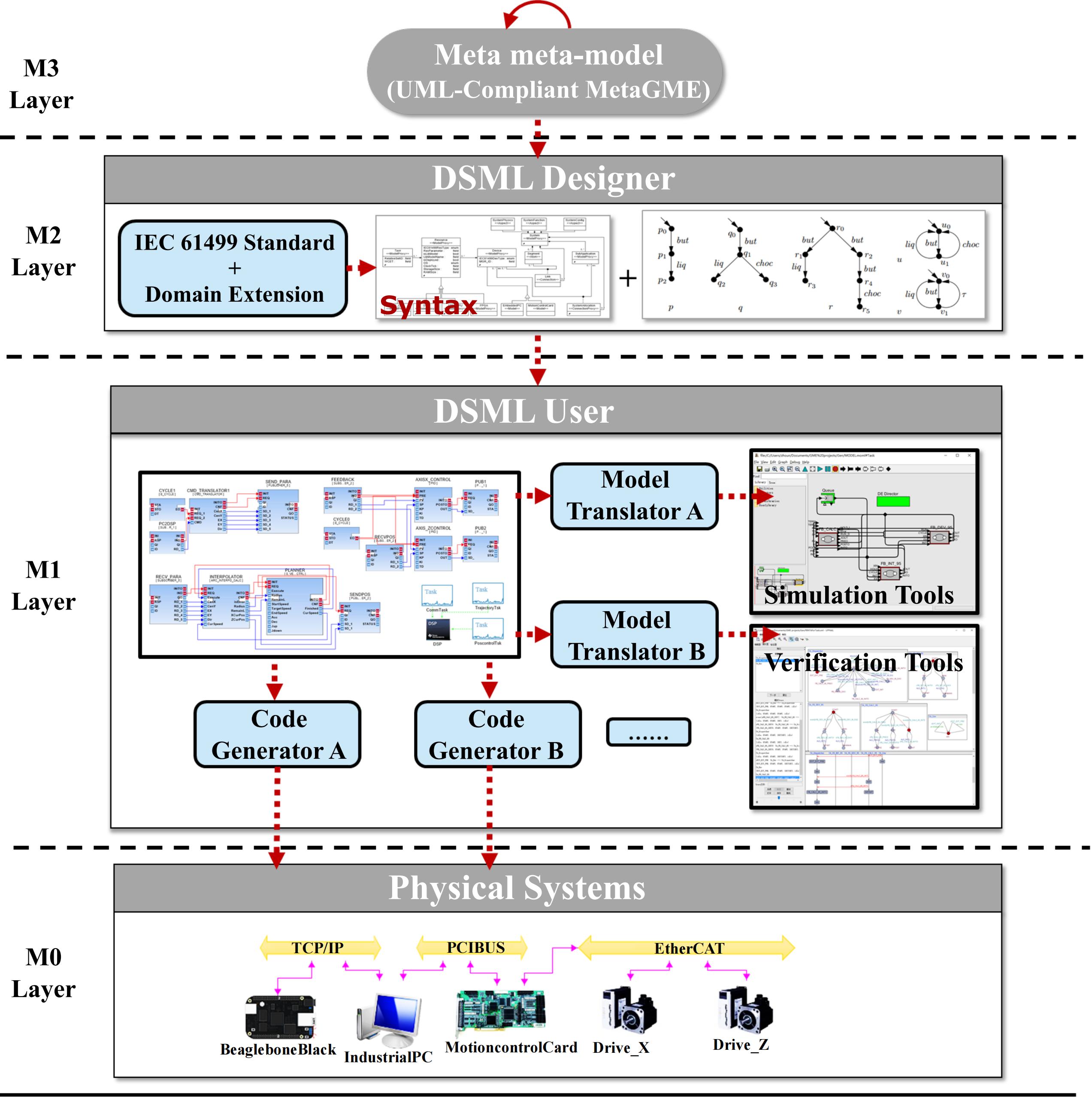
Toward dependable model-driven design of low-level industrial automation control systems
Nan Zhou, Di Li, Valeriy Vyatkin, Victor Dubinin, Chengliang Liu
IEEE Transactions on Automation Science and Engineering 2021 Journal
Recent technological advances and manufacturing paradigm evolutions in industrial settings will dramatically increase the complexity of automation control systems. Traditional solutions to the software development of low-level control kernels (e.g., numerical control kernel, motion control kernel, and real-time communication tasks) are unable to cope effectively with such complexity due to an inadequate level of abstraction and challenges for dependability. This article presents a formal semantics integrated model-driven design approach as a holistic solution. A domain-specific modeling language (DSML) is specified based on the adaption of IEC 61 499 architecture, along with the extensions of task model, task-to-resource allocation, and nonfunctional specification. Both formal structural and behavioral semantics of the proposed DSML are then explicitly defined. Design-time formal verification is also achieved by automated model transformations. A metaprogrammable environment is adopted to facilitate flexible modeling, verification, and code generation. A case study is demonstrated on implementing a prototype computer numerical control (CNC) system using the proposed solution. Note to Practitioners—The low-level automation control system in the modern manufacturing scenarios require more agility while respecting strict timing constraints. Handling such complexity with manual coding is getting harder and less efficient. The DSML and the supporting development environment presented in this article aim to enhance the level of automation, flexibility, and dependability of the whole design process. For the proposed DSML, its syntax is formalized and defined as metamodels, while the semantics is integrated through model annotation and transformation. These definitions are implemented as external rules for a metaprogrammable environment to establish our proposed development tool. The finding and insight from this article can enhance efficiency and dependability during the development of common control kernels, such as CNC kernel and motion controller.

Cyber–Physical Codesign of Field-Level Reconfigurations in Networked Motion Controllers
Nan Zhou, Di Li
IEEE/ASME Transactions on Mechatronics 2020 Journal
To be successful in the quickly evolving future of machine building and meet the increasingly complex requirements of manufacturers, equipment manufacturers face challenges of reconfigurability on the motion controller. This article proposes a cyber-physical codesign approach to enable plug-and-play of field devices via real-time Ethernet in controllers. In our proposal, we first design a modular runtime framework to facilitate auto-discovery and self-configuration of servo drives with EtherCAT. Then, we implement a self-adaptive period synthesis method for real-time scheduling. The method can automatically attain a combination of minimized periods for communication and control task during startup and achieve dynamic compensations of drifts and jitters occurred in the network. Through experiments, we show that for various combinations of cyber-physical settings, our proposal can ensure low jitters (<;10 μs) and stable latencies with a 125 μs cycle time and achieve runtime reconfiguration with a 250 μs or larger cycle time.